Why is my predicted apogee much different than expected?
A frequently asked question is: "Why is my predicted apogee much lower (or occasionally, higher) than expected?" In this tutorial we'll review the most likely culprits, and give some general guidance on how to understand your sim results.
Contents of this tutorial:
Introduction
Sometimes flight simulation results don’t seem to make intuitive sense. Either the projected apogee is much lower or maybe even higher than expected. This tutorial will show some of the most common root causes for this. The examples used are all based on real questions that have been asked by real users over the years.
Managing your mass: Get your overrides right
One of the very first things to check is that the total mass of the rocket is correct. If the rocket is not yet built, that means simply checking that the dimensions and material selection for each component is correct.
If the rocket is already built, then you might have used overrides to set the mass of the whole rocket, or used a mass object. Either way, always do a quick sanity check on the total dry mass (Mass with no motors) of the rocket, as shown in the upper left of the rocket figure::
If that number looks much too high, and you might have made the following mistake in overriding the stage (labeled Sustainer by default in one-stage rockets):
Note that, for the mass override, the checkbox Override for all subcomponents has been left unchecked. This means that the mass of the virtual “Sustainer” component, which is normally zero, will be added to the mass of all the subcomponents, resulting in a rocket that weighs around double what it should, resulting in very low apogee estimates. The correct move when overriding a stage is usually to check Override for all subcomponents for the mass or CG or CD override, if you’re using those). If you’re using the override in a different way (anything other than setting the mass/CG/CD of the entire rocket) then leaving it unchecked may be correct, but that’s not the scenario we’re discussing right now..
So, for typical usage, the sustainer override should look like this:
Because Override for all subcomponents is checked, the mass with no motors for the whole rocket is now correct. Note also that in the component tree, smaller grey override indicators are shown next to all the subcomponents, to indicate that they’ve been overridden by a parent. The blue override indicators are shown next to the component with the active override.
Similar considerations apply when overriding Pods or Boosters, which are also virtual components with no mass of their own.
Early Deployment / Motor Selection Errors
Normally you expect your recovery device deployed either (a) close to apogee, when using motor-eject or apogee deployment, or (b) long after apogee, in the case of dual-deployment. If you deploy too early, during ascent, your recovery device is going to slow down your rocket and sharply curtail its apogee. If you deploy way too early, then the effect can be quite extreme.
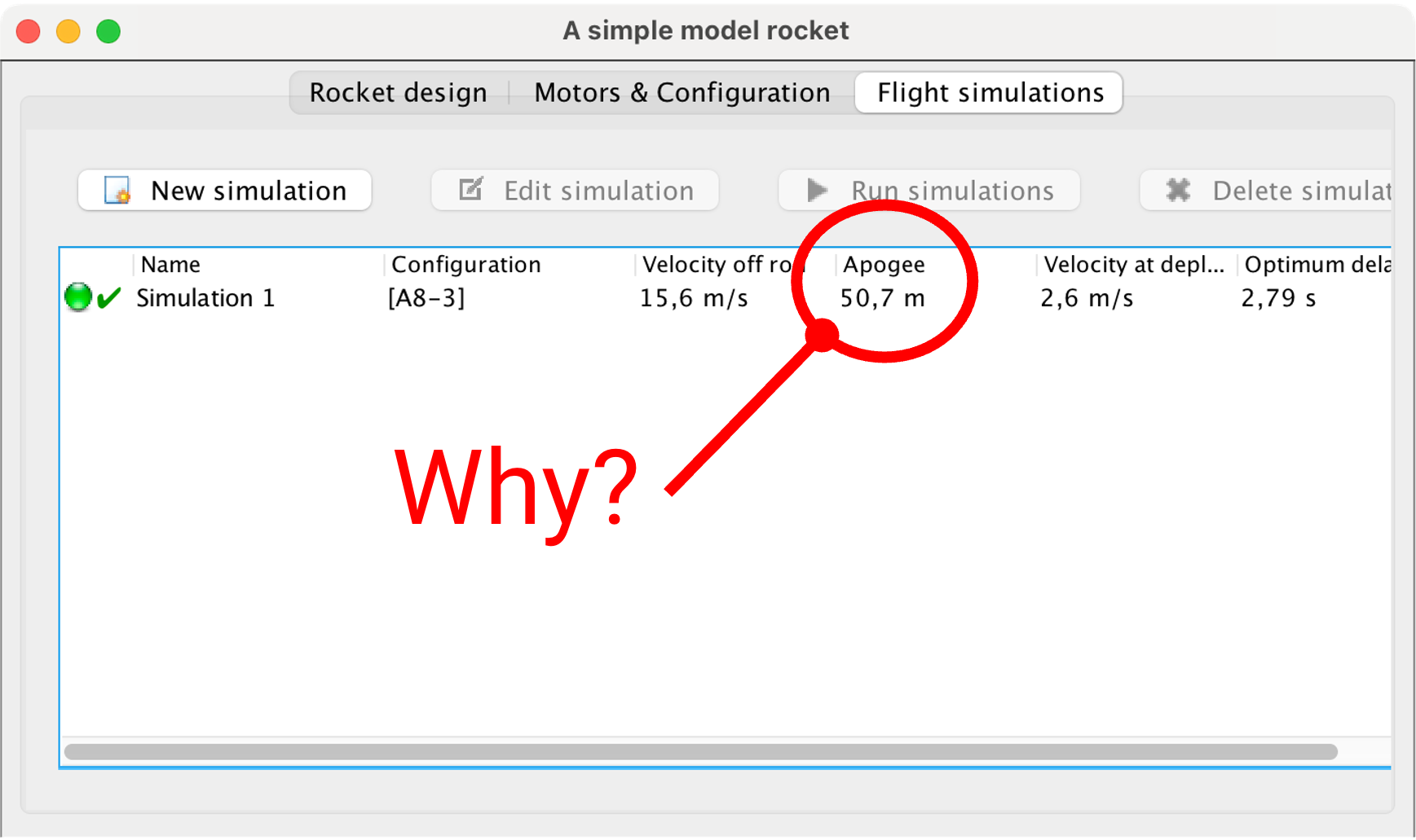
Look at these sim results for the “Simple Model Rocket” example design:
It sure seems like this rocket ought to go higher than 355 feet on a C6 motor. Your first hint that early deployment is the problem is that the sim results table will show a very high velocity at deployment, and there will be a warning indicating such if you hover over the red exclamation point at the left:
You can also see it if you create a plot of the sim, using the default settings. Select the sim, then click the Plot/Export button, and then Plot. The resulting plot will show early deployment quite clearly, as in this example (this is heavily zoomed in):
In this example, notice that the Recovery device deployment event occurs while Vertical velocity (red line) is very high. Also, note that the Motor burnout and Recovery device deployment are happening at the same time. Why does this happen? By far the most common mistake is that a motor with a too short delay has been configured… in fact, often it is a zero-delay booster motor, as in this example. Let’s go look at the motor configurations:
Here we can see that the motor in the first (and only) configuration has a -0 suffix, which means that its ejection charge will fire immediately after burnout. That is appropriate only when you’re trying to ignite a second stage black powder motor, or in some unusual circumstances in side boosters or pods.
Let’s select the first configuration and click Select Motor and see where things went wrong. Here’s the motor selection dialog:
Note the red arrow pointing to the motor delay selection, which currently shows -0. Click on that pull-down to select from the available delay values offered by the manufacturer, or just type a number right into that combobox. The sim results will tell you the Optimum delay, which is the delay value that will yield a perfect apogee deployment. In this case it’s about 6 seconds:
The pulldown shows that the C6 has -5 or -7 second delays available… we could go with either, but for now we’ll choose -7 and check out the updated sim results:
Now our apogee is estimated at 1049 feet, almost exactly triple our previous value. That’s more like it!
For a complete run-down of all the ins and outs of motor selection, go check out the Motor Selection tutorial.
Large Angle of Attack
If you get a Large angle of attack warning, it’s usually caused by either instability or low speed off the rod. In the case of instability, the rocket will tumble, resulting in a very low altitude. Normally you should notice a low stability margin (shown in the rocket figure display) before you even get to the sim results, but it’s possible to forget, and then wonder what the heck is going on.
Usually, if the rocket is unstable, you’ll get a “tumble” warning in addition to the high angle of attack, and that’ll be the giveaway. Here’s an example:
Sometimes you might get an angle of attack warning even on a rocket that is stable. That can happen if the rocket is very slow off the rod: before the rocket picks up speed it is very susceptible to any kind of wind gust. Check your speed off the rod; if it’s much less than 50 f/s (or about 35 mph or 15 m/s) then that is a likely cause. You’ll need a higher-thrust motor, a longer rod, or a lighter rocket.
When all else fails, check your simulation settings
Let’s go back to the same rocket, now it’s showing only 426 ft apogee, and again there’s a high-speed deployment warning:
Double-checking the motor delay shows that it’s correct. In fact, everything looks in order. What’s the problem now?
When all else fails, go and check your simulation settings. Click once to select the sim, and then click the Edit Simulation button:
There’s the problem, the launch rod is angled at 45 degrees. Change that to zero and everything will revert to normal. Other sim settings can mess you up as well, particularly altitude and atmospheric conditions.
Maybe your projected apogee seems too high:
Yeah, that rocket isn’t going >2000’ on a C6. Looking at the sim settings, we see that an errant atmospheric pressure setting is the culprit (unless you were actually planning to launch from the edge of space).
Sim settings aren’t usually a source of problem but they can be, if you inadvertently make an unwanted change. Generally, you will set the default sim settings in the Launch tab of your OpenRocket preferences, and then only occasionally change the settings for a sim after it has been created.
Conclusions
There are many possible reasons for unexpected sim results; usually there are visible indicators if you know where to look. Hopefully this tutorial has given you an idea how to diagnose this sort of problem with your sim.
If you come up with another case of unexpected sim results that is not covered here, please let us know and we’ll add it in.
Noticed a mistake? Please notify us at openrocket-website@lists.sourceforge.net.